



Products
-
 Revolutionary 12 axes spring & wire forming machines that allow spring manufacturers to massively produce a variety of springs with high speed and accuracy!
Revolutionary 12 axes spring & wire forming machines that allow spring manufacturers to massively produce a variety of springs with high speed and accuracy! -
 Special camless design equipped with SAMCO’s free arm technolgy that enables our series of spring machines to easily produce all kinds of difficult springs that is 30% or more efficient than traditional cam type spring former.
Special camless design equipped with SAMCO’s free arm technolgy that enables our series of spring machines to easily produce all kinds of difficult springs that is 30% or more efficient than traditional cam type spring former. -
 Special camless design equipped with SAMCO’s free arm technolgy that enables our series of spring machines to easily produce all kinds of difficult springs that is 30% or more efficient than traditional cam type spring former.
Special camless design equipped with SAMCO’s free arm technolgy that enables our series of spring machines to easily produce all kinds of difficult springs that is 30% or more efficient than traditional cam type spring former. -
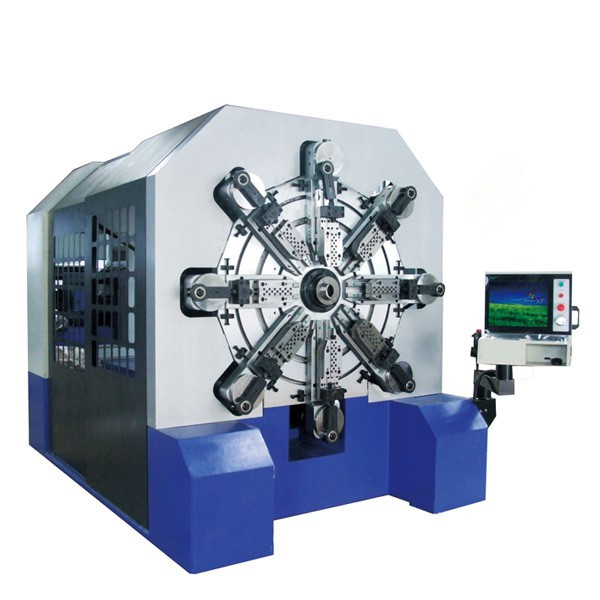
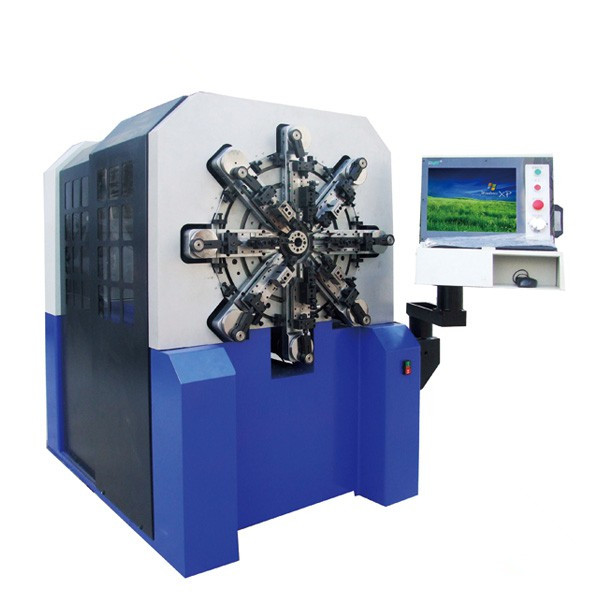
 CNC8660 is 6-axis compression spring machine, this CNC spring machine for making compression spring, oil seal spring ,battery spring, torsion machine, etc
CNC8660 is 6-axis compression spring machine, this CNC spring machine for making compression spring, oil seal spring ,battery spring, torsion machine, etc -
 CNC8635 is six-axis compression spring machine, this CNC spring machine for making compression spring, oil seal spring ,battery spring, torsion machine, etc
CNC8635 is six-axis compression spring machine, this CNC spring machine for making compression spring, oil seal spring ,battery spring, torsion machine, etc -
 SAMCO supply spring forming machine, CNC8335 is a 3 axis CNC spring machine, can make compression spring, tension spring, torsion spring, coiling spring and wire forms and etc
SAMCO supply spring forming machine, CNC8335 is a 3 axis CNC spring machine, can make compression spring, tension spring, torsion spring, coiling spring and wire forms and etc

About Servomechanism (1)
A servomechanism or servo is an automatic device that uses error-sensing feedback to correct the performance of a mechanism. The term correctly applies only to systems where the feedback or error-correction signals help control mechanical position or other parameters. For example, an automotive power window control is not a servomechanism, as there is no automatic feedback that controls position -- the operator does this by observation. By contrast the car's cruise control uses closed loop feedback, which classifies it as a servomechanism. A servomechanism is unique among control systems in that it controls a parameter by commanding the time-based derivative of that parameter. For example, a servomechanism controlling position must be capable of changing the velocity of the system because the time-based derivative (rate change) of position is velocity. A hydraulic actuator controlled by a spool valve and a position sensor is a good example because the velocity of the actuator is proportional to the error signal of the position sensor. A servomechanism may or may not use a servomotor. For example, a household furnace controlled by a thermostat is a servomechanism, yet there is no motor being controlled directly by the servomechanism.
